
 Ƕ��ʽ���̎�����е��΄��w���cؓ�d�����㷨�OӋ�c���܌���
�r�g��2025-05-28 ��Դ���A���hҊ
Ƕ��ʽ���̎�����е��΄��w���cؓ�d�����㷨�OӋ�c���܌���
�r�g��2025-05-28 ��Դ���A���hҊ
������B
ĿǰǶ��ʽ�_�l�������ԡ��ɿ��ԣ����̎������ʹ���o�B�΄��{�ȼܘ����o�B����CPU���M��(APP)������(Task)���΄�(runnable)�Ķ����{���Pϵ�䡣ϵ�y�ڵ�ؓ�d����ʮ�ַ���������ؓ�d�����o�����r�������ؓ�d������΄����t��
���Ľ�B��һ�N��ˌ��rؓ�d������{�ȼܘ���������CPU�YԴ������΄�̎��Ч�ʺ�ϵ�y���r푑�������
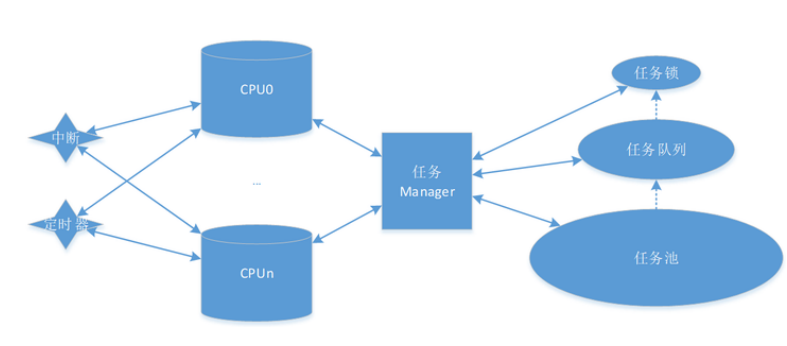
�΄ռ�����䣺�Дࡢ���r��(���ں��ܷ��)��
CPUͨ�^����Դ�����ĺ��΄�Manager�����΄�����Ы@ȡ��ռ�����m�΄գ���ɺ�ጷţ�
CPUs��ռ���Դ���P�΄ռ������ȴ���һ������Դ��
CPU���΄Ո����^���аl���µ��΄պͮa���Дࣻ
�΄��i���o�΄ղ���������У�
�΄���г�ʼ���r��Ҫ���Æ����΄ռ���
���c
CPUֻ��Ҫ�����Д�Ͷ��r�����ɣ��΄��{�Ƚ���̎�����ܘ���
�����̎����CPUs��ͬ��ɣ���ȫ��ؓ�d���⣬��һCPUؓ�d���ͣ��ӕr�p�٣�
��һCPUʧЧ������CPUs����Ӱ푣����^�m����΄գ���������ʧЧCPUԭ��ϵ�y����ʧЧ��
��Ƕ��ʽ���ϵ�y�У��΄��w���cؓ�d����������ϵ�yЧ�ʡ������ܺġ��M�㌍�r��������P�I���g�������㷨�OӋ�����F���Ե����܌����M��ϵ�y�Է�����
1. ��������
�YԴ�s����Ƕ��ʽϵ�y�ȴ桢�������ޣ����p�����㷨��
�����ԣ����̎�������ܰ�����ͬ�ܘ����ģ���ARM Cortex-A + Cortex-M�����΄��w���迼�]ָ������ԡ�
���r��Ҫ���I���ƵȈ��������M���ֹ�r�g��Deadline����
�ܺă������ӑB늉��l���{����DVFS���c�΄շ���fͬ�OӋ��
2. �΄��w���cؓ�d�����㷨���
2.1 �o�B�����㷨
���c���x�����䣬�o�\�Еr�_�N�����o���m���ӑBؓ�d��
���ͷ�����
݆ԃ�{�ȣ�Round-Robin���������΄յ����ˡ�
���ȼ����䣺�߃��ȼ��΄շ��䵽�����ܺˣ���Cortex-A����
�D�����㷨�������΄���ه�Pϵ�D��DAG�����ֵ���ͬ�ˡ�
2.2 �ӑB�����㷨
���c���\�Еr�{�����m��ؓ�d׃�����������w���_�N��
���ͷ�����
�㷨��� ԭ�� �m�È���
����ʽ�{�� �����ˣ�Master Core��ȫ���ռ�ؓ�d���Q���w�� СҎģͬ�����ϵ�y
�ֲ�ʽ�f�� ����ͨ�^��Ϣ���f������g�Д�IPC�����Qؓ�d��Ϣ�������Q���w�� ��Ҏģ�������
��и`ȡ��Work Stealing�� ���e�ˏķ�æ�˵��΄������“�`ȡ”�΄� �΄����ȴ֡��o����ه�Ĉ���
��ֹ�r�g��֪ �����΄ս�ֹ�r�g�͈��Еr�g�A�y�������w�ƿ��ܳ��r���΄� ���rǶ��ʽϵ�y����ROS��
�ܺă����� �Y��DVFS�����΄��w�Ƶ����ĺ˻��{���l������С���ܺ� 늳ع���O�䣨��o�˙C��
3. �P�I�OӋ����
3.1 ؓ�d�����c�|�l�ֵ
ؓ�dָ�ˣ�
CPU�����ʡ��΄�����L�ȡ��ȴ控��ռ�á��΄ս�ֹ�r�g�o���ԡ�
�w���|�l�l����
�o�B�ֵ����ij��ؓ�d���^�O���ֵ����80%���r�|�l�w�ơ�
�ӑB�ֵ������ϵ�y���wؓ�d�ӑB�{������ؓ�d�˜ʲ�^��ֵ20%����
3.2 �΄��w���_�N����
�p���������ı��棺�H�w�Ʊ�Ҫ�Ĵ�����B����PC��SP��������ȫ�����棨��FPU�Ĵ�������
�����ֲ��Ա�����ͨ�^NUMA-aware���䣬�p�پ���ʧЧ�̓ȴ��L�����t��
�A�w�Ʋ��ԣ��A�yδ��ؓ�dڅ�ݣ���ǰ�w�Ʋ����΄գ���Y�ϙC���W��ģ�ͣ���
3.3 ��������m��
�΄�-��ƥ�䣺
Ӌ���ܼ����΄շ��䵽�����ܺˣ���Cortex-A72����
�����΄շ��䵽���ܺˣ���Cortex-M4����
���M�Ƽ����ԣ�
�ӑB�ؾ��g����ARM��big.LITTLE�ܘ�����
�΄��R���汾�A�棨��ͬ�r���gARMv7��Thumbָ��汾����
4. ���܌����c����
4.1 ���h��ʾ��
Ӳ����NVIDIA Jetson TX2��4��Cortex-A57 + 2��Denver2����
ؓ�d��������ό��r�΄գ������΄�+�¼����΄գ���
����ָ�ˣ��΄�����ʡ�ϵ�y���������ܺģ�mJ�������푑��r�g��
4.2 �㷨���܌���
�㷨 �΄������ ��������tasks/s�� �ܺģ�mJ�� ���푑��r�g��ms��
�o�B݆ԃ 82% 1200 450 35
����ʽ�ӑB�{�� 95% 1800 380 22
�ֲ�ʽ�f�� 97% 2100 350 18
��ֹ�r�g��֪ 99% 1950 400 8
�ܺă����� 90% 1600 280 25
4.3 �P�I�YՓ
���r�ԃ��ȣ���ֹ�r�g��֪�㷨�@������푑��r�g�����ܺ��^�ߡ�
��Ч���ȣ��ܺă������㷨����������������������Ч���@����
�Uչ�ԣ��ֲ�ʽ�f���㷨�m�ϴ�Ҏģϵ�y��������gͨ��֧�֡�
5. ���͌��F����
5.1 Linux CFS��Completely Fair Scheduler��
���ԣ����ڼt�ژ�M���΄գ��ӑBӋ��̓�M�\�Еr�g��vruntime����ͨ�^ؓ�d�����w���΄ա�
������ᘌ�Ƕ��ʽϵ�y�ü��{����Ƴ��DZ�Ҫ���ܣ���cgroup֧�֣���
5.2 FreeRTOS SMP�Uչ
���ęC�ƣ�
// �΄��w�Ƃδ��aʾ��
if (xCoreLoad[0] > THRESHOLD && xCoreLoad[1] < THRESHOLD) {
vTaskMigrate(task, 0, 1); // �ĺ�0�w�Ƶ���1
}
���c��֧�փ��ȼ��^�к��R��^���o�������w�ƌ������i��
5.3 ��������΄��w�ƣ�ARM big.LITTLE��
���F��ʹ��Linux�Ⱥ˵�Energy Aware Scheduler (EAS)���Y��DVFS���΄��w�ơ�
Ч��������o�B���䣬�ܺĽ���30%��푑��r�g���Ӝp��50%��
6. δ���о�����
AI���{�ȣ����Ï����W���A�yؓ�d׃�����ӑB�{���w�Ʋ��ԡ�
߅��Ӌ��fͬ���ڶ��̎�����c߅�����c�g�σ����΄շ��䡣
��ȫ��������ֹ�΄��w���^���еĂ��ŵ��������羏��r���������
���Y
Ƕ��ʽ����΄��w���cؓ�d�����OӋ���ڌ��r�ԡ���Ч��Ӌ��Ч���g��⣺
ͬ����ˣ����ȷֲ�ʽ�f������и`ȡ�㷨��
������ˣ����ý�ֹ�r�g��֪���ܺă������ԡ�
�P�Iϵ�y���o�B����Y�τӑB�{���纽�����ϵ�y����
���H��������ͨ�^���棨��Gem5����Ӳ������Ӌ������PMC����C�㷨��Ч�ԣ���K���Fϵ�y�C���������
 �n�̷������A���hҊ��NXP�Ƴ�i.MX8M Plus�_�l�c���`�n�̷���������HarmonyOSϵ�y�����W�_�l�����n�̣��n�̷�����HaaS EDU K1�_�l�̳̣����n��ҕ�l��Դ�a���°�C�Z�Ծ���֮�����Z��ҕ�l�̳��ذ�ٛ�ͣ�Ƕ��ʽ���rֵ2000Ԫ��Ƕ��ʽ���b�̴̳�Y�����M�ͣ����㶮Ƕ���rֵ1000Ԫ������ARMϵ��ҕ�l������̳����r���t���������¡�ARM�n���n�Ì�䛾��A��ҕ�l���M�Iȡ���Ⱥ�Դ�����W����RL���ڙC����ץȡ�΄��е�ϡ�誄���c�n�̌WǶ��ʽ���̎�����е��΄��w���cؓ�d�����㷨�OӋ�c�������¼��ӵ�Ƕ��ʽϵ�y�����OӋ���Ă������ɘӵ����� Zephyr RTOS ��Ƕ��ʽ�{�� Mesh �W�j���c�OӋ�c����Ҏģģ��Ӗ���е� ZeRO �������c��Ͼ���ͨ�ʼn��s��W��(FL)�е��ݶ���ע���c����[˽���oƽ���������TinyML��Ƕ��ʽ�O����Z�����~�z�yģ���p������Ƕ��ʽ�o��ͨ���е����m�����l���ɔ_�㷨�c�l�VЧ�ʷ�Ƕ��ʽϵ�yӲ����ȫ���������ɿ�¡���ܣ�PUF�����������߅���O���TinyMLģ���Ԅӻ���֦�c�����σ�����
�n�̷������A���hҊ��NXP�Ƴ�i.MX8M Plus�_�l�c���`�n�̷���������HarmonyOSϵ�y�����W�_�l�����n�̣��n�̷�����HaaS EDU K1�_�l�̳̣����n��ҕ�l��Դ�a���°�C�Z�Ծ���֮�����Z��ҕ�l�̳��ذ�ٛ�ͣ�Ƕ��ʽ���rֵ2000Ԫ��Ƕ��ʽ���b�̴̳�Y�����M�ͣ����㶮Ƕ���rֵ1000Ԫ������ARMϵ��ҕ�l������̳����r���t���������¡�ARM�n���n�Ì�䛾��A��ҕ�l���M�Iȡ���Ⱥ�Դ�����W����RL���ڙC����ץȡ�΄��е�ϡ�誄���c�n�̌WǶ��ʽ���̎�����е��΄��w���cؓ�d�����㷨�OӋ�c�������¼��ӵ�Ƕ��ʽϵ�y�����OӋ���Ă������ɘӵ����� Zephyr RTOS ��Ƕ��ʽ�{�� Mesh �W�j���c�OӋ�c����Ҏģģ��Ӗ���е� ZeRO �������c��Ͼ���ͨ�ʼn��s��W��(FL)�е��ݶ���ע���c����[˽���oƽ���������TinyML��Ƕ��ʽ�O����Z�����~�z�yģ���p������Ƕ��ʽ�o��ͨ���е����m�����l���ɔ_�㷨�c�l�VЧ�ʷ�Ƕ��ʽϵ�yӲ����ȫ���������ɿ�¡���ܣ�PUF�����������߅���O���TinyMLģ���Ԅӻ���֦�c�����σ�����

