
 Ƕ��ʽLinux���r�Ը��죺Xenomai�p�˷����cPREEMPT_RT���܌���
�r�g��2025-05-19 ��Դ���A���hҊ
Ƕ��ʽLinux���r�Ը��죺Xenomai�p�˷����cPREEMPT_RT���܌���
�r�g��2025-05-19 ��Դ���A���hҊ
����
�ڹ��I���ơ��C���ˡ���܇��ӵ��I���r����Ƕ��ʽϵ�y���P�I�����yLinux�Ⱥ������{�șC�Ƶ����ƣ��y�ԝM���뼉푑���Ҫ���˽�Q�@һ���}���_Դ��^����˶�N���r�Ը��췽��������Xenomai�p�˼ܘ���PREEMPT_RT�a����Ŀǰ�������x���Č��ļ��gԭ�������ܱ��F���m�È������������M�Ќ��ȷ�����
1. ���r�������c��Q��������
���rϵ�y�ĺ���Ҫ��
· �_���ԣ����푑��r�g���A�y
· �����t���Д�푑����΄��ГQ��������뼉
· ���⃞�ȼ����D���_���߃��ȼ��΄ղ�������
Linux�Ⱥ˵Č��r��ƿ�i��
· �Ǔ�ռʽ�Ⱥ˶Σ��������i���Д����Σ�
· �{����ʹ����ȫ��ƽ����
· �Д�̎����ܛ�Д�푑����t�^��
������Q����������
· Xenomai�p�˼ܘ������F���r�c�nj��r�΄յ��������x
· PREEMPT_RT�a���������Ⱥ˓�ռ���������푑�����
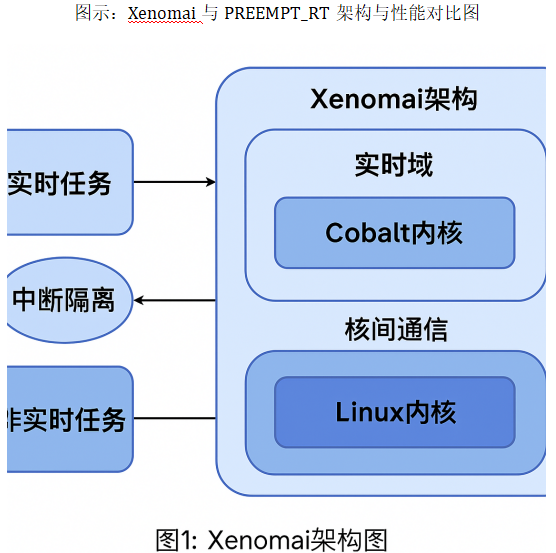
2. Xenomai�p�˷�������
�ܘ����c��
· ���r����Xenomai��Cobalt�Ⱥˣ�ֱ��̎���Д��c���r�΄�
· �nj��r���yLinux̎���nj��r�΄�
· �Д���x�����r�Д���Cobalt�Ⱥ�ֱ��푑����p�ٸɔ_
· ���gͨ�ţ�ͨ�^����ȴ��RTDM���Fͨ��
���ݣ�
· Ӳ���r�ԏ����Д����tͨ��С��10��
· �YԴ���x������nj��rϵ�y�ɔ_���r�΄�
· �ӿڼ��ݣ�֧��POSIX��VxWorks�Ƚӿ�
�����ԣ�
· ϵ�y���s�ȸߣ��{ԇ���y
· �_�l�ɱ��^��
· ��Ӳ��ƽ�_��һ��Ҫ��
3. PREEMPT_RT�a����������
���gԭ����
· ��ȫ�ɓ�ռ�Ⱥˣ����S�߃��ȼ��΄Փ�ռ�Ⱥ�
· ���ȼ��^�ЙC�ƣ���Q���ȼ����D���}
· �Дྀ�̻�������Д�̎���Ŀ��{����
· �������i�C�ƣ���Q���ɓ�ռ�����i
���ݣ�
· ܛ���r�������ã����t���_��ʮ��
· ���w�ƣ����ݬF�Б��ô��a
· �����ں϶ȸߣ������L�ھS�o
�����ԣ�
· �Ⱥ˷����Դ���һ���L�U
· �_���Բ���Xenomai
· �����ӌ����̻�֧�ֲ���
4. ���܌����c�yԇ����
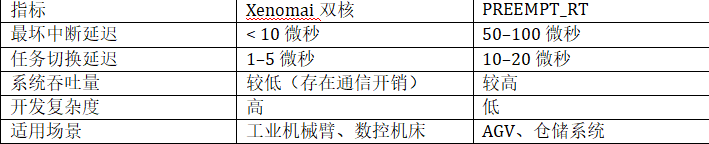
�yԇ�h����ARM Cortex-A9�p��̎������1GHz���l
�Y��ʾ����
· Xenomai��99.9%�����t����15�룬������t30��
· PREEMPT_RT��99.9%�����t����80�룬������t200��
5. ����x��Xenomai vs. PREEMPT_RT
�m���x��Xenomai������
· ��Ӳ���r��Ҫ���
· �ܳГ��^�ߵ��_�l�c�S�o�ɱ�
· ʹ��֧�ֵ��p��Ӳ��ƽ�_
�m���x��PREEMPT_RT������
· ��ܛ���r��Ҫ��
· ����Linux����ϣ���w��
· Ӳ���YԴ����
��Ϸ������h���Y��ʹ��Xenomai̎���P�I���r�΄գ�ͬ�rʹ��PREEMPT_RT����Linux��
6. δ��څ��
· �������̎�����lչ
· PREEMPT_RT�����ϲ�������
· ���������rӋ�������d��
�Y�Z
Xenomai��PREEMPT_RT�քe�������xʽ�ͼ���ʽ���r��Q�������x����m�ķ������C�Ͽ��]���r�������_�l�YԴ��Ӳ��ƽ�_�����ء��S��Linux�Ⱥ˺�Ӳ��ƽ�_�İlչ�����rLinux�đ���ǰ�������ӏV韡�
 �n�̷������A���hҊ��NXP�Ƴ�i.MX8M Plus�_�l�c���`�n�̷���������HarmonyOSϵ�y�����W�_�l�����n�̣��n�̷�����HaaS EDU K1�_�l�̳̣����n��ҕ�l��Դ�a���°�C�Z�Ծ���֮�����Z��ҕ�l�̳��ذ�ٛ�ͣ�Ƕ��ʽ���rֵ2000Ԫ��Ƕ��ʽ���b�̴̳�Y�����M�ͣ����㶮Ƕ���rֵ1000Ԫ������ARMϵ��ҕ�l������̳����r���t���������¡�ARM�n���n�Ì�䛾��A��ҕ�l���M�Iȡ���Ⱥ�ԴǶ��ʽ�O��̼�����������OTA���İ�ȫ���c�ɿ��Ա���Ƕ��ʽLinux���r�Ը��죺Xenomai�p�˷����cPREEMPT_RT�˽��Ԅ��{��Ƕ��ʽҕ�XSoC��ISP�cNPU����LoRaWAN 2.4GHz�������ؓ�W�j���ɔ_�c�l�VЧ�������Z��ģ�ͣ�LLM���е�KV���扺�s�c�ӑBϡ��ע�����C���ڔUɢģ�͵ĸ߷ֱ��ʈD�����ɼ����c�@�惞������RISC-V�����Uչ��RVV����Ƕ��ʽDSP�㷨�����cָ��Ƕ��ʽ߅��Ӌ�������FPGA�ӑB���������ü��g���`��ģ�B��ģ��(VLMM)�еĿ�ģ�B���R�pʧ�����O Ӌ�cǶ��ʽϵ�y�з���ʧ�ԃȴ棨NVM����ĥ�p�����㷨�OӋ
�n�̷������A���hҊ��NXP�Ƴ�i.MX8M Plus�_�l�c���`�n�̷���������HarmonyOSϵ�y�����W�_�l�����n�̣��n�̷�����HaaS EDU K1�_�l�̳̣����n��ҕ�l��Դ�a���°�C�Z�Ծ���֮�����Z��ҕ�l�̳��ذ�ٛ�ͣ�Ƕ��ʽ���rֵ2000Ԫ��Ƕ��ʽ���b�̴̳�Y�����M�ͣ����㶮Ƕ���rֵ1000Ԫ������ARMϵ��ҕ�l������̳����r���t���������¡�ARM�n���n�Ì�䛾��A��ҕ�l���M�Iȡ���Ⱥ�ԴǶ��ʽ�O��̼�����������OTA���İ�ȫ���c�ɿ��Ա���Ƕ��ʽLinux���r�Ը��죺Xenomai�p�˷����cPREEMPT_RT�˽��Ԅ��{��Ƕ��ʽҕ�XSoC��ISP�cNPU����LoRaWAN 2.4GHz�������ؓ�W�j���ɔ_�c�l�VЧ�������Z��ģ�ͣ�LLM���е�KV���扺�s�c�ӑBϡ��ע�����C���ڔUɢģ�͵ĸ߷ֱ��ʈD�����ɼ����c�@�惞������RISC-V�����Uչ��RVV����Ƕ��ʽDSP�㷨�����cָ��Ƕ��ʽ߅��Ӌ�������FPGA�ӑB���������ü��g���`��ģ�B��ģ��(VLMM)�еĿ�ģ�B���R�pʧ�����O Ӌ�cǶ��ʽϵ�y�з���ʧ�ԃȴ棨NVM����ĥ�p�����㷨�OӋ

