��(d��ng)ǰλ�ã���� > Ƕ��ʽ��Ӗ(x��n) > Ƕ��ʽ�W(xu��)��(x��) > �v������ > ��Ε���STM32��һ��ֱ��늙C(j��)�(q��)��
 ��Ε���STM32��һ��ֱ��늙C(j��)�(q��)��
�r�g��2018-09-29 ��Դ��δ֪
��Ε���STM32��һ��ֱ��늙C(j��)�(q��)��
�r�g��2018-09-29 ��Դ��δ֪
�����������m���� �A���h(yu��n)Ҋ����С܇�ϵ�STM32���ذ���_�l(f��)����ԓ�·���ϣ�����оƬ��STM32F10RCT��늙C(j��)�(q��)��ʹ��L298оƬ
1 �@ȡ���·Ԫ��
ͬ�rҪ�@ȡ������һЩ�|����
1.1 �·��
1.2 оƬ�f���փ� �� оƬ�Ĵ����փ� + �·ԭ��D��
2 ����҂�Ҫ������ֱ��늙C(j��)���(q��)��
2.1 �_ֱ��늙C(j��)���(q��)��ԭ�� – �� �R�_(d��)�(q��)��
2.2 ̽��һ���(q��)���·�c��оƬ���P(gu��n)ϵ
��(sh��)�H�^��l(f��)�F(xi��n)���R�_(d��)�Ŀ��ƶ˿ڽ������·���P4����
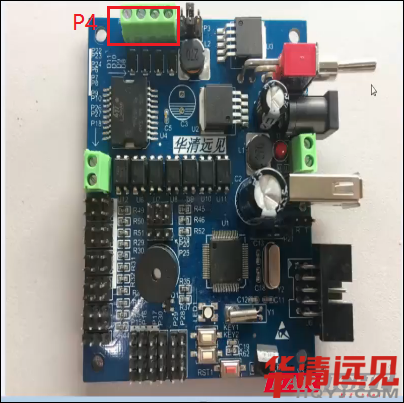
����(j��)��(sh��)�H�·�l(f��)�F(xi��n)P4���҂��c(di��n)���Ŀ��ƹ��_
��(j��ng)�^��ԃ�Y�ϰl(f��)�F(xi��n)
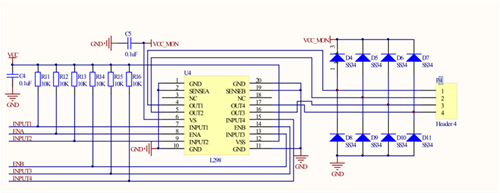
�Y(ji��)Փ��INPUTx�cOUTxݔ��ݔ���������P(gu��n)ϵ
�����҂�����ͨ�^����INPUTx������С܇���Ƅ�
��(j��ng)�^�ь��ęn�҂��l(f��)�F(xi��n)�����·��
��(j��ng)�^�·�����l(f��)�F(xi��n)
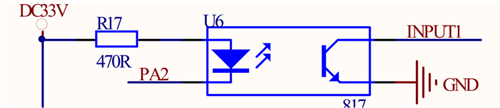
�Y(ji��)Փ�� PA2�cINPUT1�������P(gu��n)ϵ
��PA2������оƬ�ϵĹ��_��

���ԣ��҂������½Y(ji��)Փ��
PA2 INPUT1 OUT1
PB9 INPUT1 OUT2
PA1 INPUT1 OUT3
PC9 INPUT1 OUT4
PA0 INPUT1 ENA
PA3 INPUT1 ENB
�����҂������½Y(ji��)Փ:
PA2 PB9 PA1 PC9 ���� PA0 PA3
1 0 1 0 �� 1 1
0 1 0 1 ǰ��
1 0 0 0 ��߅
....
Ӳ���������E�ѽ�(j��ng)���������ܛ�������^�̣�
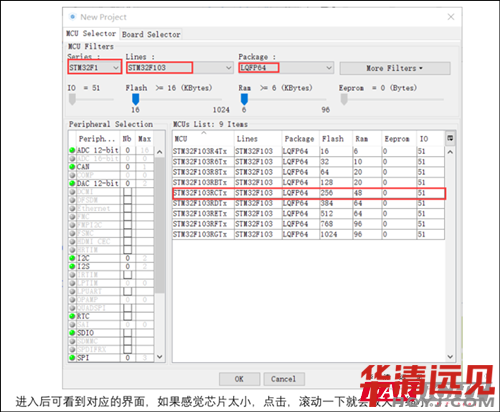
�҂�����ͨ�^STM32CubeMX������һЩ���A(ch��)���a��Ո���_Cubeܛ���M(j��n)�������x��
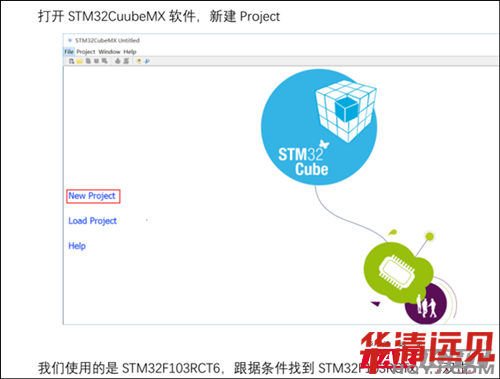

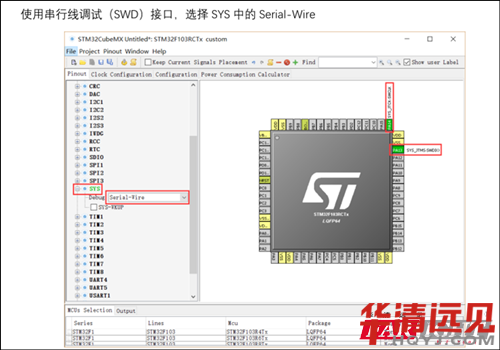
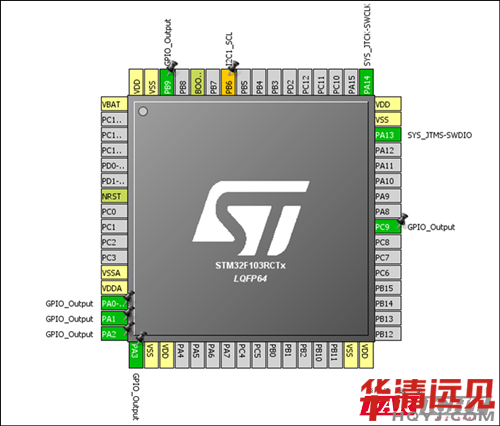
Ȼ�����Þ���� �B(t��i)
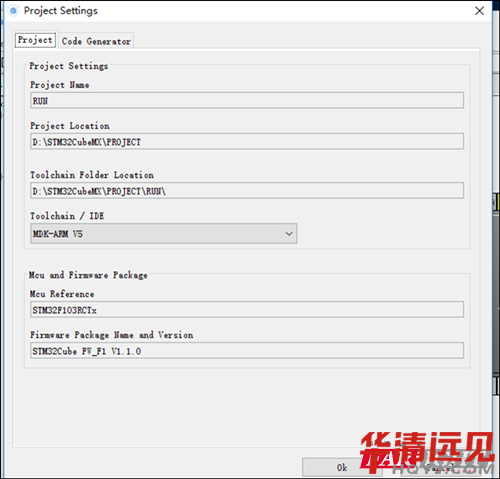
֮���c(di��n)�����ߙ��е� Proect Generate Code��ע�������ɴ��a�ĕr���x�� MDK-ARM V5��
Ȼ���҂��ڌ���(y��ng)��·�����ҵ�Ҫ����main����(sh��)Ҳ���dž�Ƭ�C(j��)���\(y��n)���rҪ�\(y��n)�е���ں���(sh��)���������ҵ�ԓ����(sh��)��MX_GPIO_Init();
�������´��a��
//�O(sh��)��늙C(j��)��B(t��i)
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_2,1);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_9,0);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_1,1);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_9,0);
//�O(sh��)��늙C(j��)ʹ�ܠ�B(t��i)
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_0,1);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,1);
Ȼ����Keil�о��g���Ԍ��M(j��n)��С܇���鿴��r��

 11�¾͘I(y��)�L(f��ng)�ư�ح���н�Y18k����н11k�����¾͘I(y��)���c(di��n)ʮ�¾͘I(y��)�L(f��ng)�ư�ح�x���A�� ��н�͘I(y��)�����ܶ����@���¾͘I(y��)�L(f��ng)�ư� | �͘I(y��)�΄ݵ��ԣ��A��W(xu��)�Ӆs��ݶ�������T�ܿɐ� ���YҲ���� 8��н�Y���t��һ�N���������e�˼ҵij���T����һ�N���YҲ�����e�����¾͘I(y��)�L(f��ng)�ư�|��һ�Q���@����Ƹ��(bi��o)��(zh��n)���Ҷ��M(j��n)�������A���h(yu��n)Ҋ90+�(xi��ng)Ŀ�@����������2021���
f(xi��)ͬ�����(xi��ng)Ŀ���A���h(yu��n)Ҋ�s�@2021�vӍ��������ȿڱ�Ӱ����I(y��)����Ʒ�A���h(yu��n)Ҋ��������2021����h���k��У��Ϣ�W(xu��)�ƺ���(li��n)����ůͬ�й���(chu��ng)�ѿ� 2019�A���h(yu��n)Ҋ��������������ع�������УAI�˹����܌W(xu��)�ƽ��O(sh��) �A���h(yu��n)Ҋ�˹������Y���A���h(yu��n)Ҋ���������Ĵ�ʡ��(li��n)�W(w��ng)������s�@��(y��u)����I(y��)����
11�¾͘I(y��)�L(f��ng)�ư�ح���н�Y18k����н11k�����¾͘I(y��)���c(di��n)ʮ�¾͘I(y��)�L(f��ng)�ư�ح�x���A�� ��н�͘I(y��)�����ܶ����@���¾͘I(y��)�L(f��ng)�ư� | �͘I(y��)�΄ݵ��ԣ��A��W(xu��)�Ӆs��ݶ�������T�ܿɐ� ���YҲ���� 8��н�Y���t��һ�N���������e�˼ҵij���T����һ�N���YҲ�����e�����¾͘I(y��)�L(f��ng)�ư�|��һ�Q���@����Ƹ��(bi��o)��(zh��n)���Ҷ��M(j��n)�������A���h(yu��n)Ҋ90+�(xi��ng)Ŀ�@����������2021���
f(xi��)ͬ�����(xi��ng)Ŀ���A���h(yu��n)Ҋ�s�@2021�vӍ��������ȿڱ�Ӱ����I(y��)����Ʒ�A���h(yu��n)Ҋ��������2021����h���k��У��Ϣ�W(xu��)�ƺ���(li��n)����ůͬ�й���(chu��ng)�ѿ� 2019�A���h(yu��n)Ҋ��������������ع�������УAI�˹����܌W(xu��)�ƽ��O(sh��) �A���h(yu��n)Ҋ�˹������Y���A���h(yu��n)Ҋ���������Ĵ�ʡ��(li��n)�W(w��ng)������s�@��(y��u)����I(y��)����

