�����Ŀ�ġ�
�W��STM32��M0ϵ��оƬ��ʹ��
�W��MDK�_�lܛ����ʹ�÷�����������{ԇ
ͨ�^���������stm32F0xx��I2Cʹ�÷���
�����h����
Wi-Fi���S������ģ�K
MDK�_�l���ߺ������ķ�����
PC�C XP��Window7/8
�������ݡ�
�������S�������������FSTM32F0xxģ�MI2C�ɼ����S�Č��r���������c�����¹�һ����PC���@ʾ�����Ĕ�����
�����ԭ����
��STM32ģ�K�У�Ӳ�����B����һ�����S���ٶȂ�������ͨ�^�O��Ӳ���B�Ӽ�ܛ�������������������S���ٶȫ@ȡx��y��z�S3�������ϵļ��ٶ���Ϣ��
�_�l����ʹ�õ���MMA7455L���ٶȂ���������ݔ�����ǔ�����̖���е�ͨ�V�����ض��a�������Ҝyԇ�������Þ�ͨ�^�Д����_��INT0�cINT1���z�y0g�����Ҍ����ٵ��Ƅ��M�Йz�y�����c��
ͨ�^��������Ŀ��ƼĴ����Ќ��벻ͬ�ă��ݣ���������ԓ�����������ڲ�ͬ��ģʽ�ϣ������Ԝyģʽ�����Cģʽ���yԇģʽ�����ٶ��x��ģʽ������ͨ�^I2C��������ʹ��SPI�������xȡ�������Ĕ���ݔ������STM32ģ�K�ϣ�ʹ�õ���ģ�MI2C�����팍�F�������xȡ��
MMA7455L������ֻ�ڏęCģʽ���M�й������O���ַ��$1D��֧�ֶ��ֹ����x/��ģʽ����֧��Hsģʽ��10λ��ַģʽ����ʼ�ֹ�ģʽ�����M�І��ֹ����xȡ�r���������C��������������������l��һ���_ʼ��̖��Ȼ���ǏęC��ַ���x/��λ����"0"��ʾ�@��һ����������MMA7455L���l��һ��������̖���������C����һ�������xȡ������8λ�ļĴ�����ַ��Ȼ�������������һ���������CҲ���l��һ���؏͵��_ʼ��̖�������Ԍ�ַ���������xȡ��ǰ�x��ļĴ������ęC�͕������͔������ȵ���������֮�����C�͕�����һ��ֹͣ��̖�� ����֮�⣬߀�����x����ֹ��x�͆��ֹ�����ģʽ��
STM32ģ�K�_�lƽ�_��MMA7455L�cMCU�B��ԭ��D��
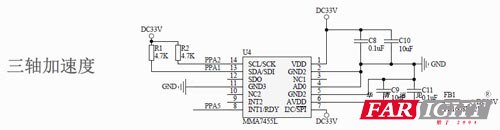
�D ���S������ԭ��D
STM32��PA_2���_�cģ�K�ĕr����_���B��PA_1���_�cģ�K�Ĕ������_���B���\��stm32��GPIO���_��ģ�M�xȡI2C�ĕr��
�����E��
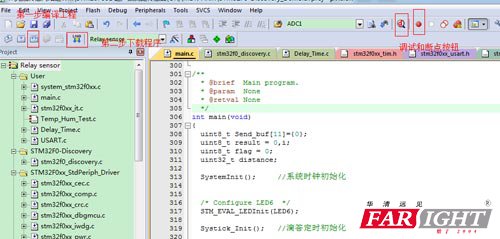
��ɵ�3�¹�"RealView MDK4.22a�����_�l�h��"���Ϳ���������������ˣ����ȴ��_��P�еĂ����������ļ���
����Դ�a·�����A���hҊ-�W�j�ؓ�D�Y�Ϲ�P\�o������ģ�K\����Wi-Fi����-STM32F051\����Դ�a\STM23F051 ���ٶȶȂ�����(ģ�Mi2c)\MDK-ARM

���g���d���������Ⱦ��g�����d��
�����Ҫ�{ԇ��Ԓ���������d�������c�����Ϸ����{ԇ���o�M���{ԇ���档
�����B�ӣ�

�D �����B��
�ψD�B���f����APģʽ��Wi-Fi��ͨ�^����ֱ�Ӻ�PC�C���B�ӡ�����Wi-Fi���յ��������Դ��ڵ���ʽݔ����PC�Ĵ����{ԇ�������@ʾ��
�����Y����
���ô����{ԇ�����������_�����{ԇ���ߣ�������115200������̖(�����X�Ķ˿�̖)���c�����_��
���յ��Ĕ������£�

����ͨ�^���ڰl��21 57 01 00 41 01 ff 00 00 00 1F F6�����^������_��
21 51�� ���ַ�'��W'
01 00 ���O���ַ ע�⣺01��Ͱ�λ��ַ��00��߰�λ��ַ
41 ���O����� 'A' �������S������
01 ff 00�� �x�������S����x/y/z�����Sֵ����֮ؓ��
1F����ǰ���
F6 ��У�͡�
���������a��
Mian.c
COBOL Code
����int main(void)
����{
����uint8_t ReadValue,i;
����uint8_t buf[11]={0};
����SystemInit(); //ϵ�y�r犳�ʼ��
����/* Configure LED6 */
����STM_EVAL_LEDInit(LED6);
����Systick_Init();//�δr��ʼ��
����/* Initiate Blink Speed variable */
����BlinkSpeed = 1;
����GPIO_Configuration_Init();
����USART_Cfig_Init(); //���ڳ�ʼ��
����I2C_init(); //I2C ��ʼ��
����TIM_INT_Config();
����MM7455_Init();
����buf[0] = 0x21;
����buf[1] = 'W';
����buf[2] = 0x01;
����buf[3] = 0x00;
����buf[4] = 'A';
����/* Assume base board in zero-g position when reading first value. */
����Axis3_Test(&x, &y, &z);
����xoff = 0-x;
����yoff = 0-y;
����zoff = 0-z;
����while(1)
����{
����Delay(1000);
����Axis3_Test(&x, &y, &z); //�xȡ���S��XYZ��ֵ
����x = x+xoff;
����y = y+yoff;
����z = z+zoff;
����buf[5] = x;
����buf[6] = y;
����buf[7] = z;
����for(i=0; i<(11-2);i++)
����{
����ReadValue ^=buf[i+1];
����}
����buf[10] = ReadValue;
����UART_Send(USART2,buf, 11);
����Delay(1000);
����}
����}
�xȡI2CоƬ�Ĕ�������
COBOL Code
����void Axis3_Test(int8_t *x, int8_t *y, int8_t *z)
����{
����uint8_t Read_buf;
����/* wait for ready flag */
����while ((getStatus() & ACC_STATUS_DRDY) == 0);
����/*
����* Have experienced problems reading all registers
����* at once. Change to reading them one-by-one.
����*/
����I2C_Read_one_Byte(&Read_buf, ACC_ADDR_XOUT8, MMA_ADRESS);
����*x = (int8_t)Read_buf;
����I2C_Read_one_Byte(&Read_buf, ACC_ADDR_YOUT8, MMA_ADRESS);
����*y = (int8_t)Read_buf;
����I2C_Read_one_Byte(&Read_buf, ACC_ADDR_ZOUT8, MMA_ADRESS);
����*z = (int8_t)Read_buf;
����}
 WI-FI���S���������c���
�r�g��2018-09-21 ��Դ��δ֪
WI-FI���S���������c���
�r�g��2018-09-21 ��Դ��δ֪




